伸縮門(mén)及停車(chē)場(chǎng)
整體解決方案專(zhuān)業(yè)供應商
伸縮門(mén)及停車(chē)場(chǎng)
整體解決方案專(zhuān)業(yè)供應商
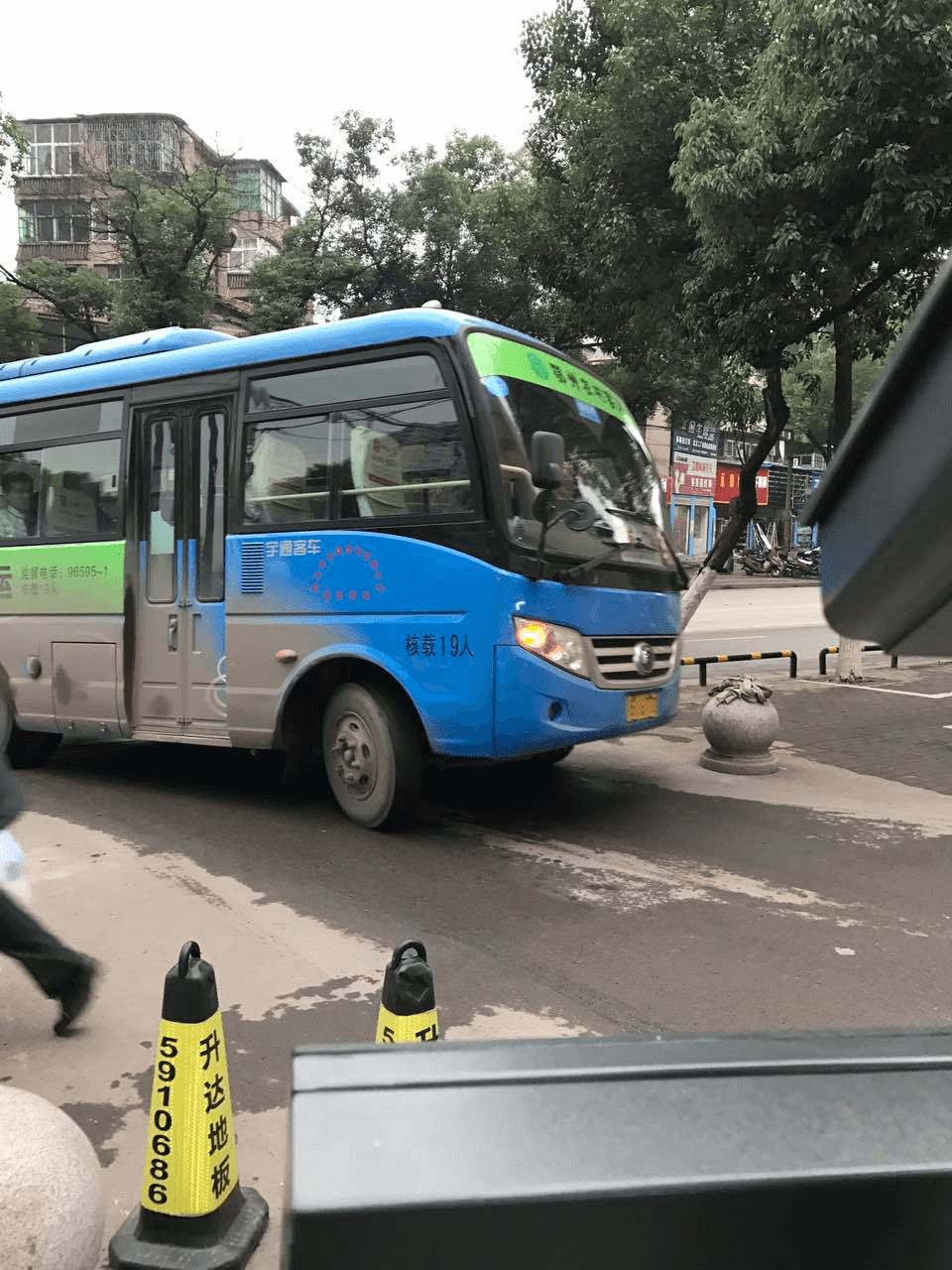
去現場(chǎng)觀(guān)察,主要是要注意車(chē)道的長(cháng)寬和來(lái)車(chē)方向. 車(chē)道的寬度盡量控制在4米內,大于4米的要擺放隔離樁限制;長(cháng)度至少要有6米,太短會(huì )造成車(chē)牌識別不正,就像下圖這樣,車(chē)遷 直時(shí)攝像機已經(jīng)看不到車(chē)牌了.
來(lái)車(chē)方向分單向來(lái)車(chē)和左右來(lái)車(chē).單向來(lái)車(chē)就只用裝一個(gè)攝像頭,鏡頭對著(zhù)車(chē)行來(lái)的方向; 雙向來(lái)車(chē)的,就比較復雜,如果車(chē)道長(cháng)度不夠的,就需要左右各裝一個(gè)相機來(lái)識別兩個(gè)方向的車(chē)輛,如下圖就需要安裝兩個(gè)相機


攝像頭定位原則: a.攝像機安裝在道閘主機前靠近車(chē)道的一側,道匣桿起落時(shí)不能遮擋相機視線(xiàn); b.相機 好的識別距離是離相機3-6米處,所以要保證車(chē)在此距離處車(chē)身已遷直,如果未遷直,就要將相機往后挪; c.要保證定位處車(chē)輛和行人不會(huì )誤碰到攝像機; d.盡量緊靠道閘主機但又不能影響道閘使用; e.攝
像頭定位處和車(chē)輛成像角度的側角和俯角盡量控制在30度以?xún)? 大不能高于45度,否則會(huì )影響識別率,若不能滿(mǎn)足, 就要找其它的定位點(diǎn).

f.定位處必須保證車(chē)輛不管從何處方向駛來(lái),都能保證車(chē)牌可以被拍攝到,若不能滿(mǎn)足就必須裝加裝攝像機輔助.
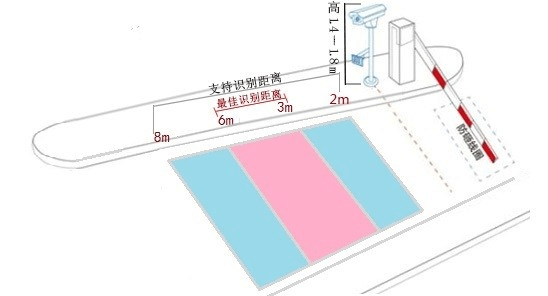
定位示意圖
線(xiàn)路檢查無(wú)誤后,就開(kāi)始通電調試了. 以調試一進(jìn)一出停車(chē)場(chǎng)為例. a.將一個(gè)攝像機網(wǎng)線(xiàn)接入交換機,另一個(gè)像機暫不接入,因為像機出廠(chǎng)默認IP是192.168.1.100,如果同時(shí)接入會(huì )造成IP沖突. 這里先將進(jìn)口相機接入交換機. b.用"一體機配置工具"搜索相機IP,如果搜索的到,說(shuō)明網(wǎng)絡(luò )通訊正常.
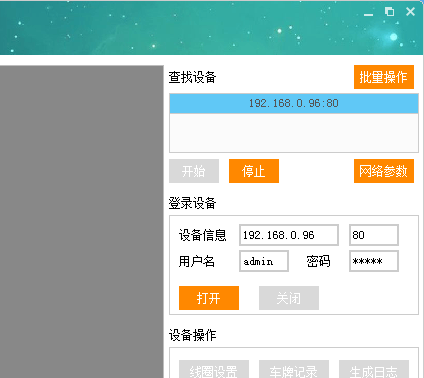
上圖表示能搜索到已接入網(wǎng)絡(luò )的相機. c.修改該相機IP地址,然后接入下一臺攝像機,依此修改所有相機的IP.
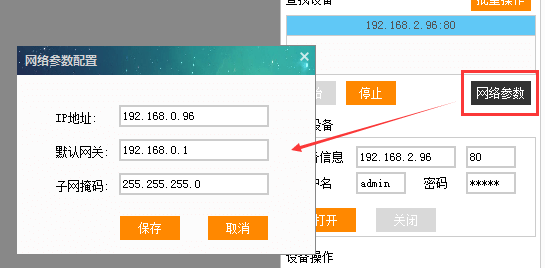
修改相機IP地址
d.調好相機角度,登入相機網(wǎng)頁(yè)設置識別區域和虛擬線(xiàn)圈位置 就像前面說(shuō)的,攝像頭定位處和車(chē)輛成像角度的側角和俯角盡量控制在30度以?xún)? 大不能高于45度,滿(mǎn)足這個(gè)條件的前提下 我們設置識別區域才有意義.
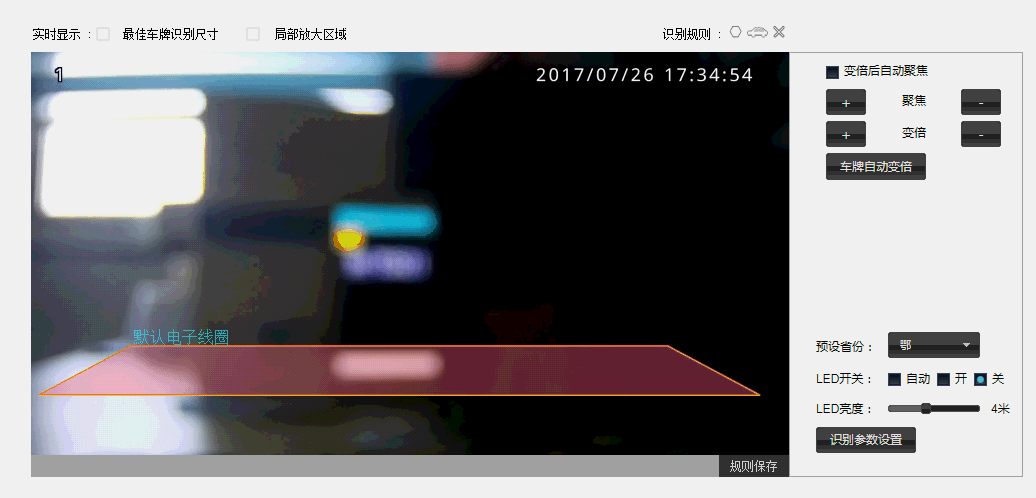
在網(wǎng)頁(yè)端的"安裝引導"上進(jìn)行繪制,確保虛擬線(xiàn)圈繪制在視頻畫(huà)面的下半部分,務(wù)必確保所有來(lái)車(chē)的車(chē)牌都能觸碰到虛擬線(xiàn)圈 以此來(lái)確定虛擬線(xiàn)圈的寬度; 虛擬線(xiàn)圈下邊緣的線(xiàn)可以拉到視頻畫(huà)面的底部,以此來(lái)確定虛擬線(xiàn)圈的高度.如圖:

車(chē)牌成像的像素值推薦在140~160之間,能夠達到 佳識別率,或者車(chē)牌在視頻畫(huà)面的寬度占視頻畫(huà)面寬度的1/8~1/9 佳, 直觀(guān)的調試方式:車(chē)牌在虛擬線(xiàn)圈區域的大小和藍色虛擬車(chē)牌尺寸相當. 調試方法:
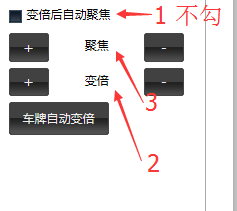
先變倍使車(chē)牌在畫(huà)面中的顯示盡量大點(diǎn),然后聚焦,使畫(huà)面變清晰.
同時(shí)調節攝像機萬(wàn)向節,使車(chē)牌盡量保持水平,避免出現車(chē)牌左高右低或者左低右高的情況, 佳的效果可以參考下圖:


上圖中,車(chē)牌在畫(huà)面中基本是水平的,且大小合適. 小技巧:調節萬(wàn)向節,讓相機往車(chē)輛駕駛室這邊偏,直到車(chē)牌在圖片中顯示是水平的.

識別區域要把車(chē)牌在畫(huà)面上的有效運動(dòng)范圍都包含進(jìn)來(lái). 注意:所有現場(chǎng)都必須畫(huà)上識別區域! 如圖:

設置完成后,在實(shí)時(shí)視頻里查看效果.
綠色線(xiàn)圈即為識別區域線(xiàn)圈;紅色線(xiàn)圈即為虛擬線(xiàn)圈.
設置完成后,在實(shí)時(shí)視頻里查看效果.
注意觀(guān)察虛擬線(xiàn)圈觸發(fā)的識別結果,車(chē)牌寬度值是否介于140-160之間.
后說(shuō)一下線(xiàn)圈的繪制對識別結果的影響:
首先我們是基于視頻流的車(chē)牌識別系統,車(chē)輛在識別區域內行駛過(guò)程中,每秒會(huì )產(chǎn)生許多張識別圖片,并產(chǎn)生許多個(gè)車(chē)牌識別 結果.比如鄂A12345進(jìn)入攝像機識別區域內,在攝像機能看清車(chē)牌那刻開(kāi)始產(chǎn)生識別結果,可能1秒鐘會(huì )產(chǎn)生25個(gè)車(chē)牌識別結果或許 更多,這不重要,重要的是這些結果不一定都是正確的,有可能結果會(huì )是鄂A12346,湘A12345等等. 當行駛的車(chē)牌觸碰到我們繪制的虛擬線(xiàn)圈時(shí),就開(kāi)始將之前眾多車(chē)牌結果中,出現次數 多的那個(gè)車(chē)牌輸出給車(chē)牌識別軟件, 不管這個(gè)結果是對是錯,軟件認為獲得了正確的結果,然后經(jīng)過(guò)軟件端的邏輯處理,輸出命令控制道匣和顯示屏的動(dòng)作. 從這個(gè)理論上分析,識別區域上邊和虛擬線(xiàn)圈上邊之間的距離其實(shí)是預識別區,預識別區越大,識別的結果就越多,從而獲取正 確識別結果的概率就越大.這也是為什么攝像機裝的這么高,俯角不能太大的原因. 上述文字可以用八個(gè)字概括:多幀識別,單幀觸發(fā).
外置補光燈推薦采用白色LED補光燈,20~30W,聚光性質(zhì). 安裝高度要和攝像機保持在0.5米~0.7米的距離,外置補光燈的亮斑直接打在車(chē)牌或者車(chē)牌偏下一點(diǎn),可以根據車(chē)牌過(guò)曝情況 做微調,比如攝像機離地面高度1.6米,補光燈裝在同一根立柱0.9米~1.1米高; 注意:特別需要避免與以下外置補光燈錯誤的安裝情形: 外置補光燈與攝像機的安裝距離過(guò)近,如下圖,兩者的安裝距離小于30cm,補光燈的光線(xiàn)會(huì )直接被車(chē)牌表面的反光涂層反射 到鏡頭,導致車(chē)牌在視頻圖像中過(guò)曝,顯得發(fā)白,影響 終的識別效果.

注意:請確保外置補光燈的安裝位置到攝像機的垂直距離保持在50cm以上.

版權所有:








 商務(wù)通交談
商務(wù)通交談
 掃一掃免費獲取報價(jià)
掃一掃免費獲取報價(jià)
 QQ交談
QQ交談